Yaqi Xie
Incoming Assistant Professor at the University of Illinois at Urbana-Champaign (UIUC).
I am actively recruiting PhD students, interns, and postdocs to join my lab at UIUC. If you are interested in working with me, please email me yaqixie.ai@gmail.com with your CV and a brief description of your research interests.
I am an incoming Assistant Professor at the University of Illinois at Urbana-Champaign (UIUC) ECE and CS (affiliate), and a postdoctoral fellow at Carnegie Mellon University (CMU) in the Robotics Institute advised by Prof. Katia Sycara. Before that, I received my Ph.D. in Computer Science from National University Singapore (NUS), where I was fortunated to be advised by Prof. Harold Soh.
My work centers on Human-AI Synergy through neural-symbolic fusion, bridging the complementary strengths of foundation models and symbolic reasoning to create adaptive, interpretable intelligence systems and agents. I aim to integrate structured domain knowledge with neural architectures to enhance robustness, efficiency, and trustworthiness in dynamic environments. My research applications span robotics, perception, and generative models.
In the long run, I strive to build adaptive AI agents and robots that not only learn from data but also incorporate human knowledge and feedback, work seamlessly with humans, and align with human needs to enhance everyday life.
Feel free to contact me if you are interested in my research and want to discuss relevant research topic or potential collaborations!
Selected Publications
For a complete list of publications, please visit my Google Scholar page.-
 Unifying Deep Predicate Invention with Pre-trained Foundation ModelsIn Preprint, 2026
Unifying Deep Predicate Invention with Pre-trained Foundation ModelsIn Preprint, 2026 -
 Evolving Contextual Safety in Multi-Modal Large Language Models via Inference-Time Self- Reflective MemoryIn Conference on Computer Vision and Pattern Recognition (CVPR), 2026CVPR
Evolving Contextual Safety in Multi-Modal Large Language Models via Inference-Time Self- Reflective MemoryIn Conference on Computer Vision and Pattern Recognition (CVPR), 2026CVPR -
 pySpatial: Generating 3D Visual Programs for Zero-Shot Spatial ReasoningIn International Conference on Learning Representations (ICLR), 2026ICLR
pySpatial: Generating 3D Visual Programs for Zero-Shot Spatial ReasoningIn International Conference on Learning Representations (ICLR), 2026ICLR -
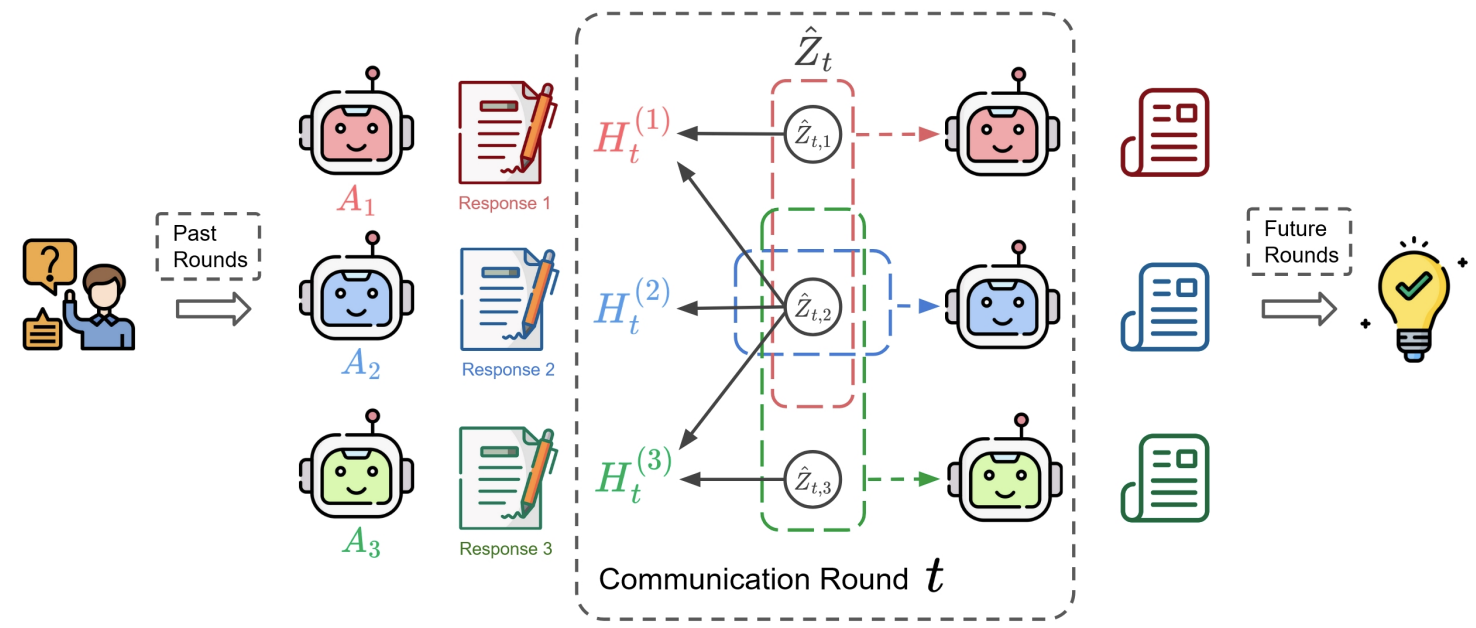 Thought Communication in Multiagent CollaborationIn Advances in Neural Information Processing Systems (NeurIPS), 2025
Thought Communication in Multiagent CollaborationIn Advances in Neural Information Processing Systems (NeurIPS), 2025 -
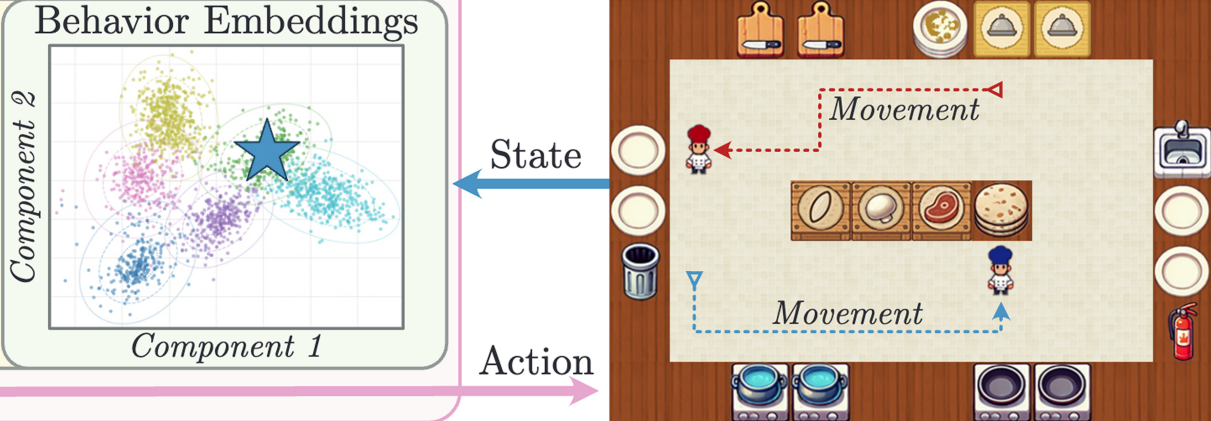 Adaptively Coordinating with Novel Partners via Learned Latent StrategiesIn Advances in Neural Information Processing Systems (NeurIPS), 2025
Adaptively Coordinating with Novel Partners via Learned Latent StrategiesIn Advances in Neural Information Processing Systems (NeurIPS), 2025 -
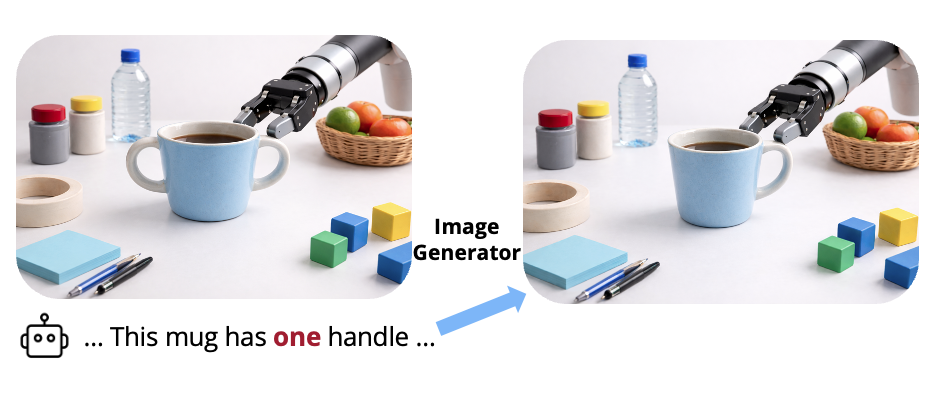 Self-Correcting Decoding with Generative Feedback for Mitigating Hallucinations in Large Vision-Language ModelsIn International Conference on Learning Representations (ICLR), 2025ICLR
Self-Correcting Decoding with Generative Feedback for Mitigating Hallucinations in Large Vision-Language ModelsIn International Conference on Learning Representations (ICLR), 2025ICLR -
 Let Me Help You! Neuro-Symbolic Short-Context Action AnticipationIEEE Robotics and Automation Letters (RA-L), 2024RA-L, ICRA
Let Me Help You! Neuro-Symbolic Short-Context Action AnticipationIEEE Robotics and Automation Letters (RA-L), 2024RA-L, ICRABest Paper at ICRA Nonverbal Cues -
 ShapeGrasp: Zero-Shot Task-Oriented Grasping with Large Language Models through Geometric DecompositionIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024IROS
ShapeGrasp: Zero-Shot Task-Oriented Grasping with Large Language Models through Geometric DecompositionIn IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024IROS -
 HiKER-SGG: Hierarchical Knowledge Enhanced Robust Scene Graph GenerationIn IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024CVPR
HiKER-SGG: Hierarchical Knowledge Enhanced Robust Scene Graph GenerationIn IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024CVPR -
 Embedding Symbolic Knowledge into Deep NetworksIn Advances in Neural Information Processing Systems (NeurIPS), 2019
Embedding Symbolic Knowledge into Deep NetworksIn Advances in Neural Information Processing Systems (NeurIPS), 2019 -
 Embedding Symbolic Temporal Knowledge into Deep Sequential ModelsIn IEEE International Conference on Robotics and Automation (ICRA), 2021ICRA
Embedding Symbolic Temporal Knowledge into Deep Sequential ModelsIn IEEE International Conference on Robotics and Automation (ICRA), 2021ICRA -
 Multi-task trust transfer for human–robot interactionThe International Journal of Robotics Research (IJRR), 2019IJRR
Multi-task trust transfer for human–robot interactionThe International Journal of Robotics Research (IJRR), 2019IJRR -
 Robot Capability and Intention in Trust-Based Decisions Across TasksIn ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2019HRI
Robot Capability and Intention in Trust-Based Decisions Across TasksIn ACM/IEEE International Conference on Human-Robot Interaction (HRI), 2019HRI -
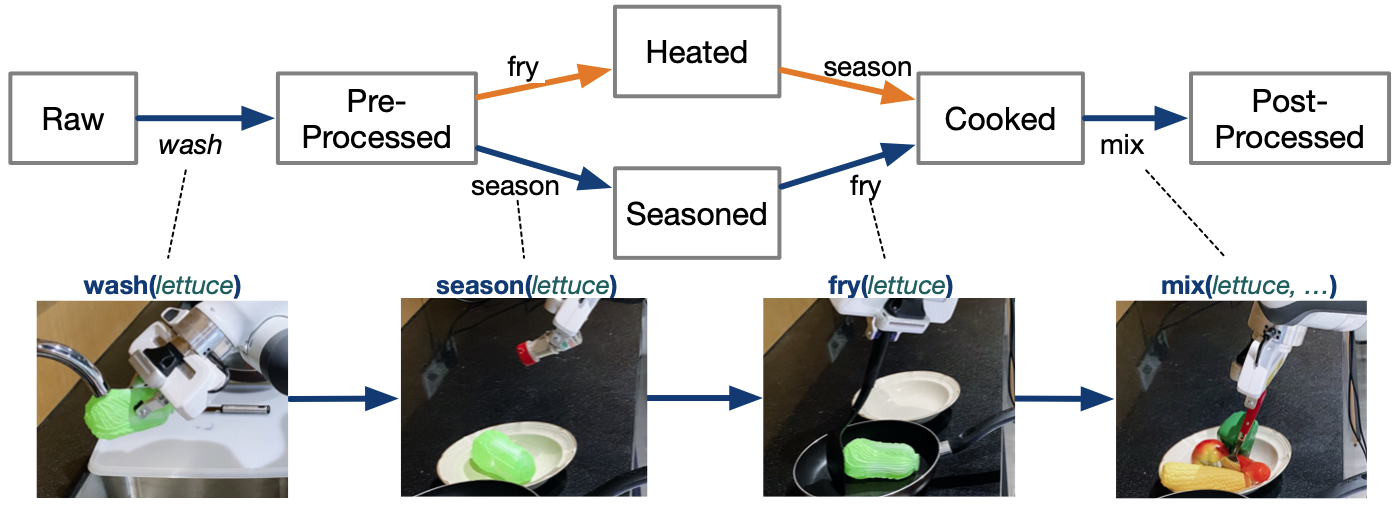
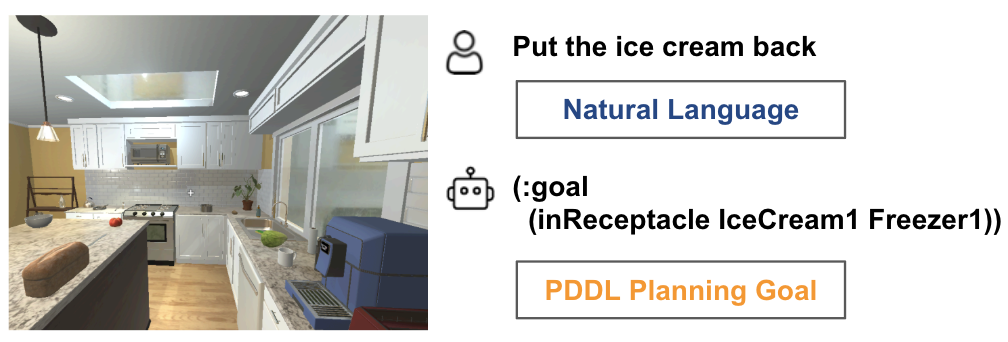 Translating Natural Language to Planning Goals with Large-Language ModelsIn Preprint, 2023
Translating Natural Language to Planning Goals with Large-Language ModelsIn Preprint, 2023